The Sandbox: the AVSandbox knowledge hub
The Sandbox knowledge hub discusses many of the crucial issues affecting the development, engineering, use and regulation of Autonomous Vehicles.
Scroll to explore

Radar Modeling – Reflection of an EM Wave
Radar sensors are a key component to the current and future technologies of ADAS (Advanced Driver-Assistance Systems) and AV (Autonomous Vehicle). They are cheap and mature technologies that can operate under any weather conditions, and when coupled with lidars or cameras, they allow a complete and precise mapping of the environment. As many of these systems are complicated and expensive to test, validation is mostly done through simulation. In this blog post, I will explain how to model a physics-based radar, focusing on the reflection of waves on physical objects.
What Should We Model?
When modeling an electromagnetic wave, we assume that it behaves like a ray of light to determine its direction. In other words, it follows the principle of Fermat that states that light follows the shortest path (straight line in an homogeneous media). From that we can use the laws of geometrical optics (see figure 1).
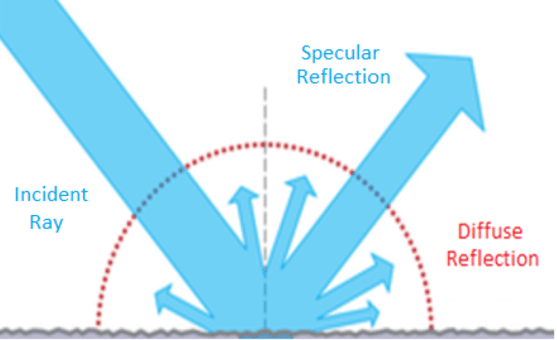
There are 2 phenomena that need to be taken into account to model what happens when a wave hits a continuous surface :
- Specular Reflection
- Diffuse Reflection
Impact of Material
The magnitude of these reflections are dependent on the magnitude of the incident wave, but also the wavelength, incident angle, polarization and material properties. They give rise to a coefficient, called the Fresnel coefficient, that indicates the percentage of “magnitude” reflected (the energy of a wave is proportional to the square of the wave’s magnitude). In figure 2you can see how the Fresnel Coefficient is affected by polarization and grazing angle for the road and a metal surface.

Figure 2: Fresnel Coefficient of different materials. (Created by the author)
The magnitude of the reflected wave now needs to be distributed between specular and diffuse reflection, and that is done via a specular coefficient that varies with incident angle, wavelength and material roughness (both in surface and in depth).
Magnitude of the Diffuse Reflection
The direction of the specular reflection is straightforward, but the number of diffuse rays being modeled depends on how complex your algorithm is (theoretically you would have to model it in all directions, not only in the incident plane). For any direction you choose to model, you will have to add a third coefficient related to the quantity of energy reflected in that particular direction. In order to do that, the point of impact is regarded as an emission point with a defined beam width directed towards the normal of the plane (figure 3 – 1, Lambertian model) or directed towards the specular reflection (figure 3-2, directive model). You can then add a directive coefficient and a backscatter effect.

Figure 3.1 & 3.2: Modelling of diffuse reflection. (Modified from Three different reflection models: Lambertian, glossy, specular. by Vierge Marie licensed under CC-BY-SA 4.0)
Conclusion
In short, an incident plane of magnitude Ei on a continuous surface gives rise to a specular reflection in the plan of incidence of magnitude:
Es = Ei * Fresnelcoeff (γ, εr, μr, pol, λ, σ+) * Specularcoeff(γ, λ, σH)
and a diffuse reflection in all direction of magnitude :
Ed = Ei * F(γ, εr, μr, pol, λ, σ+) * (1 – S(γ, λ, σH)) * D(angle, model, directivity)
The model then has to be completed with the integration of other phenomenon such as diffraction, divergence of a curved surface and physical optics. When integrated in a complete simulation taking into account the propagation losses, the antenna characteristics and a model of the car’s environment, radar data can be accurately generated and processed.
Written by Geoffroy Heurtier – Project Engineer at Claytex
Please get in touch if you have any questions or have got a topic in mind that you would like us to write about. You can submit your questions / topics via: Tech Blog Questions / Topic Suggestion

Ultra photorealism in AVSandbox
Thanks to the hard work of rFpro, ultrarealistic light rendering is now available in the AVSandbox toolkit. This is ...

Tackling High Development Costs: How AVSandbox Can Accelerate Your Autonomous Vehicle Deployment
Reducing costs of autonomous vehicle development without compromising AV Safety The development and successful deployment of autonomous vehicles is ...

Determinist Traffic Simulation
Introduction In my previous blog deterministic scenario simulation, I detailed why we define our simulator deterministic and what is ...

{kind=link}
#/media/Fichier:Reflection_models.svg){kind=link}